WIN10下用WSL编译INAV
用于Windows 10的Linux子系统可能是在Windows 10下构建INAV的最简单方法。
- 使用来自Internet的任何指南启用WSL(Windows Subsystem for Linux)
- 从Windows应用商店安装
Ubuntu - 打开
Ubuntu并运行: git clone https://github.com/cesforchina/inav.git克隆我的inav-2.2.0储存库cd inav进入项目文件夹sudo add-apt-repository ppa:team-gcc-arm-embedded/ppasudo apt-get updatesudo apt-get install gcc-arm-embedded make rubyarm-none-eabi-gcc -v查询版本号(非必需操作)
它将安装 gcc-arm-none-eabi gcc version 6.3.1 20170620
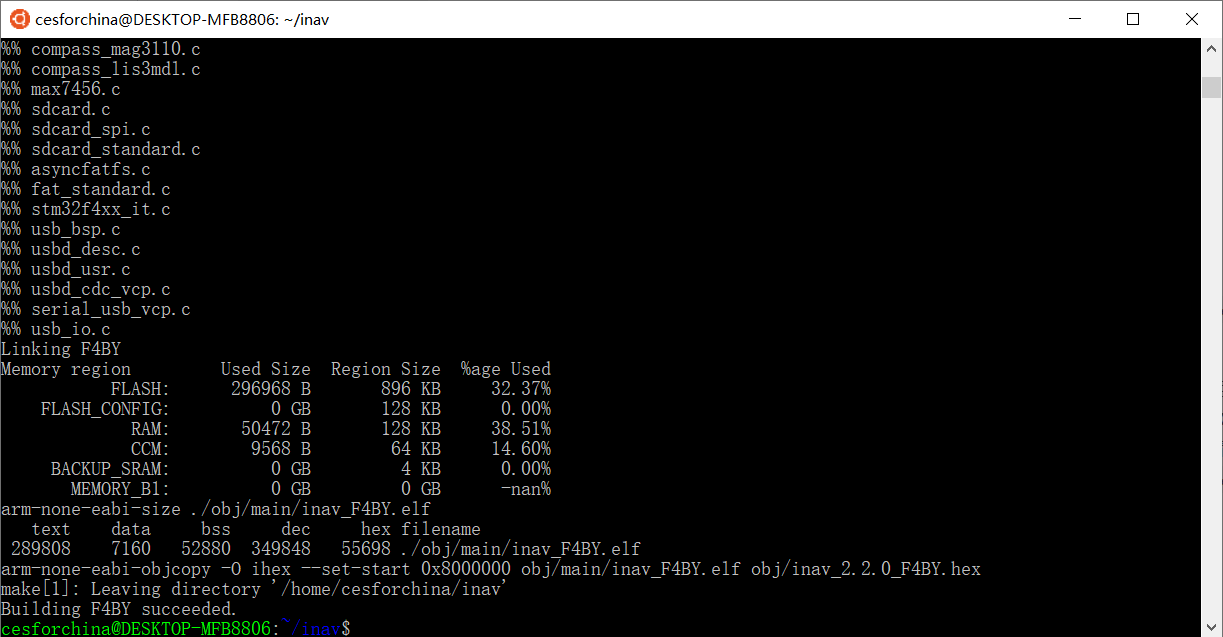
从这时起,可以使用以下命令构建INAV
make TARGET={TARGET_NAME}
当然,将{TARGET_NAME}替换为您要编译的目标,编译后的固件在WSL文件区中
C:\用户\你的WIN10用户名\AppData\Local\Packages\
CanonicalGroupLimited.UbuntuonWindows_***\
LocalState\rootfs\home\你的WSL用户名\inav\obj
同理也可以对你的储存库进行以上操作,可以避开因为不熟悉github操作却使用官方储存库导致的各种问题。有关项目的修改建议在WSL外部进行,通过GitHub Desktop克隆到本地后,进行修改,上传合并等,然后在WSL中cd inav***进入你的项目文件夹,进行git pull操作,即从储存库中拉取更新到WSL项目文件夹中。在编译过某目标板之后,下次编译时应清除
C:\用户\你的WIN10用户名\AppData\Local\Packages\
CanonicalGroupLimited.UbuntuonWindows_***\
LocalState\rootfs\home\你的WSL用户名\inav\obj
文件夹中的内容,即上次编译相关的文件。